

互聯網人喜歡說風口,更喜歡把風口放到一起,好像這樣能造成1加1大于2的效果。
而且有些被寄予厚望的技術可能確實有內在聯系,于是就更可能被看做有相互刺激的合力產業來對待,期待協同爆發能產生天翻地覆的效果。
比如人工智能和無人駕駛。
確實,人類利用人工智能技術來處理比如機械操作、駕駛、勘測等工作是毫無疑問的必然。
但是必然不等于馬上實現,我們現在所處的只是眾多技術在研發和商業化的開端而已。從0進化到10,1和9都是不能邁過的。目前的人工智能和無人駕駛,可能就處在這樣一個關系里。
【無人駕駛的第一級形態,必然是低速和固定場景應用】
首先要知道,到底什么是無人駕駛。
無人駕駛的核心判斷點,在于從自動駕駛的人力合力和傳統汽車操作方式中解脫出來,變成車輛根據設置目標主動完成駕駛的全過程。
而從技術成熟和應用可能性的過程上來說,無人駕駛絕不可能是一蹴而就,直接在城市交通的復雜路況上行駛的。
由于對安全的擔憂和對數據積累的需要,初期無人駕駛,必然有兩點制約:
首先是速度。無人駕駛開始投放應用時,必然無法很快就像跟正常機動車一樣的高速行駛。而是要從時速五十公里以下的低速車開始應用,逐步檢測和完善無人駕駛系統的可靠程度。
其次是應用場景。初始階段的無人駕駛,基本不可能馬上在復雜路況中投放使用。我們更可能看到的可能是校園、景區、企業園區、機場,這樣的場景中使用無人駕駛車輛。一方面是這些場景中路況簡單,無人駕駛要處理的問題很少,而且可以整體更換無人駕駛車輛,保證車輛間交互的可行性。另一方面這些場景對運力的要求低,使用時間少,從而滿足初級階段無人駕駛低速度、強監控的特點。
所以說,無人駕駛初期要淘汰的一定是低速電動擺渡車,而這一階段,人工智能的的參與感并沒有那么強烈。
【相比深度學習,更重要的是避險保障、精準行駛和人機交互】
人工智能管理無人駕駛車輛,邏輯是通過深度學習和應對機制分析體系,來解決車輛行駛中的各種問題,保障行駛安全。
但是車輛在真實交通場景中遇到的問題是千變萬化的,每一個問題都可能是新問題,很多甚至執法者難以分析責權,更別提基于對以往案例學習的人工智能體系了。尤其是在交通方案選擇上,在復雜路況和擁堵路況上,目前的人工智能算法很難完全代替經驗和人工的判斷能力。
而低速的無人駕駛,人工智能的應用點也不夠多。這種場景中,主要確保行駛安全和運營流暢的技術是三種:避險保障技術,精準行駛技術和新型的人機交互。
避險保障是保證無人駕駛車輛安全的先覺因素,目前看來最佳的解決方案是通過硬件判斷車輛與他物的距離和可能碰撞速度,從而指揮駕駛體系完成躲避。因此感知硬件類是核心。
精準行駛是保證車輛可以完成交通目的的技術和硬件體系,主要的是基于地圖和GPS、車輛感知的路線判定。此外智能變速,地形模塊也很重要。
經常被人忽視的,是無人駕駛模式下的人車交互。自動駕駛技術下,人車交互方式并沒有多大改變。但無人駕駛模式下,人的指令方式要從全程操作變為應急指揮和命令下達,需要全套的操作體系來適應這一需求。
反觀這些無人駕駛的需求,會發現人工智能目前還很難區別其中任何一項,因此初級階段的人工智能更可能作為輔助技術加入無人駕駛技術群里,而非真正成為中樞指揮者。
當然未來人工智能一定會成為人類完成交通的方式,但那需要人工智能本身的大幅度進化以及人工駕駛底層技術和硬件的完善,距離二者不期而遇,目前來看還有一些距離。
【初級無人駕駛,這些技術最重要】
那么不妨來看看,初級無人駕駛哪些技術最重要,最有可能改變無人駕駛進入市場的速度。
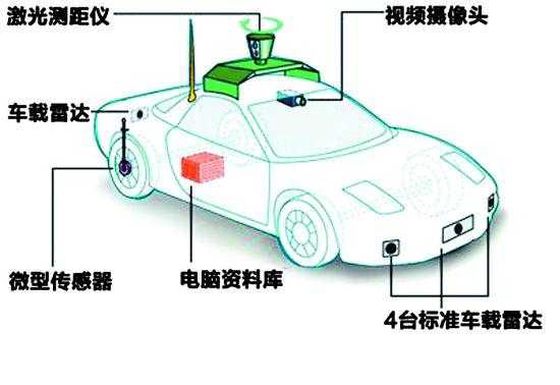
一、激光雷達。雷達感知在外環境,好像是目前最成熟的無人駕駛保障技術。而且谷歌Waymo等企業相繼宣布將在激光雷達硬件上提供新的解決方案,大幅度縮減激光雷達成本。這個領域接下來很可能產生新的大硬件服務商,并且快速投入自動駕駛車輛的配置中,迎接無人駕駛的到來。
二、多元傳感器。傳感和測繪系統是解決無人駕駛安全隱患問題的核心,尤其是在復雜環境中的避險。無人駕駛傳感器有多種解決方案,而最可能最后占領市場的是集合聲波、紅外線、熱能的多元傳感器。
三、視覺攝像頭。攝像頭是無人駕駛車輛的眼睛,也是無人駕駛車輛空間判斷感的依據。但是鏈接處理器的視覺處理系統和應用硬件一直都沒有特別成熟的產品。這個領域有很多新技術,也可以加入人工智能的輔助。應該會是接下來無人駕駛的重頭戲。
四、超精準地圖體系。與其讓無人駕駛智能計算路線,更好的解決辦法當然是讓所有車輛根據地圖自行移動,從而實現運力和交通安全的最大化,這就需要精度到分米級別的實時地圖。國內外的地圖企業與無人駕駛結合最大的可能點也在這里。
五、人機交互系統。前面說過,無人駕駛的人機交互系統將是全新的。那么具體的應用方式和標準化會成為急需的重點技術。目前這個領域新技術還很少,但準入門檻并不高,適合創業者深入。
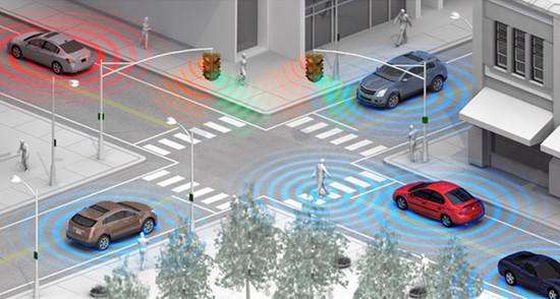
六、車輛間交互系統。基于車聯網系統,讓車輛間相互感知并完成避讓,是無人駕駛領域物聯網技術的直接反應。完整的車輛交互應該能夠做到車與人,車與車,車與路,車與網的綜合交互,這個方向是技術的核心突破。
通過這幾個急需的技術突破點,不難看出無人駕駛目前對硬件、軟件、系統的需求都很強烈。這些技術的接連爆發和受到資本關注,是接下來無人駕駛市場的常態。相比較美國和以色列團隊的熱愛小技術,小硬件,國內玩家好像過于執迷整車制造和人工智能了。到頭來很有可能又一次造成核心技術掌握在別人手里,甚至期待中的大風口過于遙遠而遲遲不能到來。
大未來源于一步步的小突破。至少目前,還是不要把無人駕駛和人工智能想的那么親密比較好。





