
云深處科技首次公布其對絕影X20的全自主協同搜索測試:5臺絕影X20四足機器人在3,000平米未知環境下,成功完成對8個模擬目標的協同搜索,整個過程由絕影X20全自主決策與規劃,將進一步拓展機器狗在應急救援與勘測探索等場景中的應用潛力。

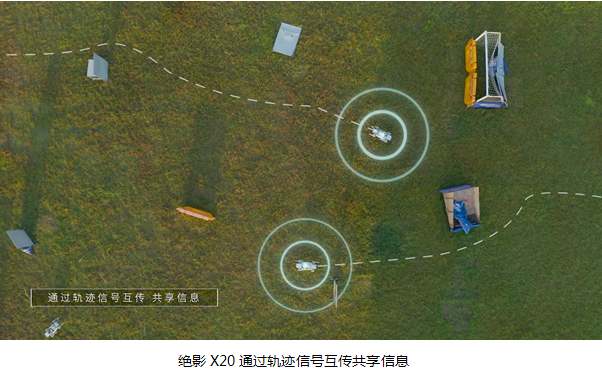
在應急救援與勘測探索中,人工開展相關作業常面臨信息采集不足等問題,工作人員也可能面臨缺氧、有毒有害氣體、塌方等人身安全威脅。四足機器人能夠替代或輔助工作人員先行進入高危場景,深入傳統輪式或履帶機器人較難進入的復雜地形;四足機器人集群協同,則實現了多臺機器狗之間的搜索信息與路徑共享,大大提升了未知環境中的搜索速度與效率。

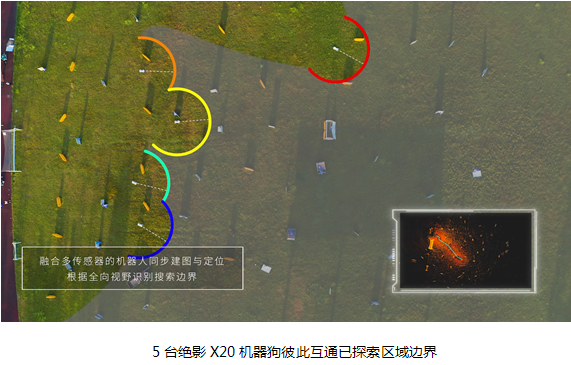
未知環境下的自主搜索是全球機器人研究的前沿領域,其難度與技術含量并不是固定動作群控或“機器人集體舞”所能比較的。此次測試中,絕影四足機器人搭載了高清全景攝像機,激光雷達以及自組網通信設備。通過激光同步建圖與定位算法,對未知環境進行建圖;利用全景相機進行深度學習目標識別;多臺機器狗通過高效的協同機制,實時自主分配探索地域目標,在探索過程中,機器人自主規劃路線并實現避障,最終完成大范圍未知區域的集群探索與目標識別。
云深處科技感知算法主管唐威介紹:先進的集群協同算法是絕影X20之間協同高效完成搜索工作的重要關鍵。通過提取最簡潔的有效信息進行通信共享,可大大減少多機器人之間通信帶寬需求,增強系統在通信局限的環境中的適用性。相關文章已發表在2022 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR2022)。
云深處科技(DEEP Robotics)是全球四足機器人行業應用引領者,在先進運動控制算法、環境感知及AI算法等領域處于國際前沿,其自主研發的“絕影”系列機器人已在電力巡檢、公共救援、勘測探索等多種應用環境中落地推廣。除機器狗多狗協同外,云深處科技也在同浙江大學湖州研究院等合作伙伴一同探索不同類型機器人的協同作業,此前雙方就在湖州黃龍洞嘗試了四足機器人與空中機器人在地下空間的“機狗協同”。
了解更多及查看此次機器狗自主協同搜索測試視頻,請關注微信“云深處科技”及其視頻號。





