
黑天鵝與灰犀牛齊飛,新技術與新產業共生。從上世紀末第一款產品亮相至今,自動駕駛技術經歷了快速而多元的發展,終于走到了今天。
算力方面,21世紀初,自動駕駛還在靠笨重的計算機提供終端算力;而今天,英偉達、Mobileye已經將終端芯片算力提升至了1000 TOPS以上。
算法方面,20世紀末,自動駕駛還在依靠簡單的人工規則進行少量固定場景內的有限規控;而今天,基于深度神經網絡的大算法模型,已將AI推入了自主學習的時代。
硬件方面,高昂的感知硬件成本一度讓自動駕駛技術長期停滯于實驗階段;而今天,感知硬件性能的大幅提升與成本的大幅下降已讓諸多自動駕駛技術實現了規模化量產。
自動駕駛技術的不斷進步,在促成更多自動駕駛產品落地的同時,也帶來更多有關技術發展路線的爭議,這又讓我們對自動駕駛的未來產生了新的疑問:
在算力、算法、硬件升級之后,自動駕駛的下一個階段又將是什么?
“以數據驅動的自動駕駛3.0時代已經到來,只有感知、認知、模式、數據4個技術條件并行成立才能稱為真正進入自動駕駛新時代。我們所做的一切,都是為了能夠做出數據通道和計算中心,以便可以更高效地獲取數據,并把數據轉化為知識。”

以上這一段話,出自毫末智行CEO顧維灝之口。在剛剛結束的第六屆HAOMO AI DAY上,顧維灝像往常一樣,分享了現階段毫末自動駕駛技術研發的新觀點和新思路。
但有一點不同的是,驅動這些新觀點與新技術發酵的,并非來源于毫末智行自動駕駛需求,而是來源于后者對自動駕駛技術發展的思考。
俗話說得好,不想做將軍的廚子不是好士兵,而在毫末智行看來,不想做學術研究的自動駕駛企業,最終肯定也搞不好自動駕駛技術。
換句話說,想要炒好自動駕駛這盤菜,就要對材料、火候、步驟了如指掌。而當下浮躁的自動駕駛行業,又顯然缺乏“靜下心來好好研究”的動力。
所以在這樣的背景之下,毫末智行究竟研究出了一張怎樣的菜譜呢?
從第一性原理到自動駕駛3.0時代
在之前的HAOMO AI DAY中,毫末智行重點提到了一個哲學概念“第一性原理”。基于對第一性原理的思考及運用,毫末智行得以發現驅動自動駕駛迭代的關鍵,并最終推出了數據智能體系MANA。
作為誕生于2000多年前的哲學概念,第一性原理自然不可能直接給毫末智行打開“捷徑”,但確實又給困惑中的毫末智行指明了方向。
第一性原理強調,世間萬物的發展都建立在其各自的基石假設之上,這也是驅動萬物發展的本質;只要找到屬于自動駕駛的基石假設,就能在其基礎上建立并推動自動駕駛發展。
那么自動駕駛發展至今,驅動其快速發展的究竟是什么呢?
讓我們不妨先回到自動駕駛發展的最初階段。在2004年,美國DARPA面向社會舉辦了第一屆自動駕駛技術大賽。但在第一屆比賽中,沒有一家參賽車隊能夠完賽。
經過事后分析,行業內普遍認為,這是因為當時的自動駕駛硬件性能太低所導致的。果然在2005年第二代大賽中,得益于硬件性能的提升,很快便有車隊從一眾選手中脫穎而出,拿到了主辦方提供的豐厚獎金。
在這一階段,自動駕駛技術所包括的感知硬件、計算機與感知算法剛剛得到確立,但總體來看,感知硬件依舊是自動駕駛如何在復雜環境下實現視覺感知的最大短板,所以硬件性能成為了這一階段自動駕駛技術的發展重點。
這就是顧維灝口中的自動駕駛1.0時代。
顯而易見的是,對比曾經捉襟見肘的硬件性能,如今自動駕駛技術可用的感知硬件可謂五花八門,包括激光雷達、毫米波雷達、感應波雷達、攝像頭等硬件設備種類多樣,性能選擇也高低皆有,足夠滿足從L2到L4各類輔助駕駛及自動駕駛的需求。
由此來看,硬件自然不是驅動自動駕駛迭代的關鍵。而在此之后,自動駕駛發展又迎來了顧維灝口中的自動駕駛2.0時代。
在2.0時代中,自動駕駛終于可以通過性能優良的感知硬件“看”清世界了,但在感知之后如何進行決策規控,則又帶來了有關自動駕駛算法的進化。
谷歌Waymo與特斯拉是自動駕駛2.0時代中的主角,基于跨越式與漸進式路線,二者各自選擇了完全不同的發展道路,但結果也顯而易見:
特斯拉FSD已經實現了高速域和城市域場景的打通,車隊規模很快就將達到百萬級;而在無數輪融資后,谷歌Waymo依舊沒能走出電子柵欄,商業化運營進程緩慢。
究其原因,馬斯克搬出了他對第一性原理的理解:成本與速度是自動駕駛技術研發及迭代的關鍵,而核心就在于這一過程中,自動駕駛企業所獲取到的數據。
谷歌Waymo與特斯拉自動駕駛算法都基于深度學習而來,而這種當下公認的自動駕駛算法的迭代核心,就是AI自己訓練自己,即AI通過數據進行學習,由此實現不斷進化。
在這一過程中,數據量越大越好,數據量獲取與學習速度越快越好,并且獲取數據的成本越低越好。
谷歌Waymo雖然在自動駕駛競爭中“起了個大早”,但由于有限的量產車隊限制了數據獲取量、獲取速度與獲取成本,終究還是“趕了個晚集”。這也得以讓我們從中得到一條關鍵信息:
在硬件與軟件達標后,數據將成為驅動自動駕駛發展的核心,而數據量越大、數據獲取成本越低、數據學習速度越快,自動駕駛就能更快完成數據閉環,實現自動駕駛技術的指數級發展。
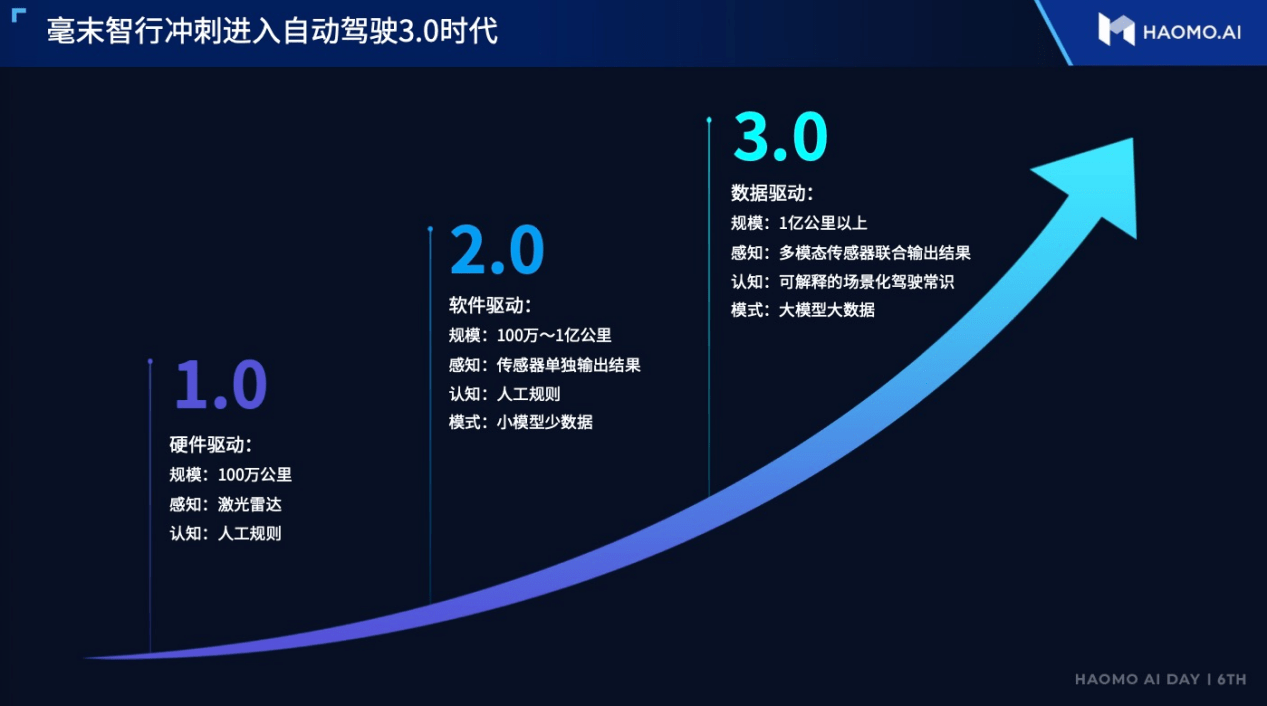
這就是顧維灝口中的自動駕駛3.0時代,而對于包括毫末智行的所有自動駕駛企業來說,這也是即將步入的一個全新時代。
為數據解綁,打通數據驅動的高速公路
對于如今的毫末智行來說,自動駕駛3.0時代似乎還為時尚早,畢竟顧維灝也表示,數據驅動的自動駕駛3.0時代需要至少1億公里以上的數據支撐,而如今毫末智行的輔助駕駛累計行駛里程,才剛剛突破1700萬公里。
不過,“未雨綢繆”本就是毫末智行的優勢,除了能快速領悟出“數據驅動自動駕駛迭代”的發展核心外,強大的規模化量產實力也能幫助毫末智行在數據獲取上快速達到目標。
在此之前,毫末智行已經針對城市場景,對數據智能體系MANA進行了大幅升級,具體表現在對具有Attiontion機制的Transformer大模型的運用,不僅讓自動標注及訓練效率大幅提升,也讓融合感知的魯棒性與泛化性有了更好的表現。

但就像一條高速公路一樣,Transformer大模型賦予了海量數據多車道暢行的條件,而標注與訓練也終將成為造成高速擁堵的“收費站”與“檢查站”。
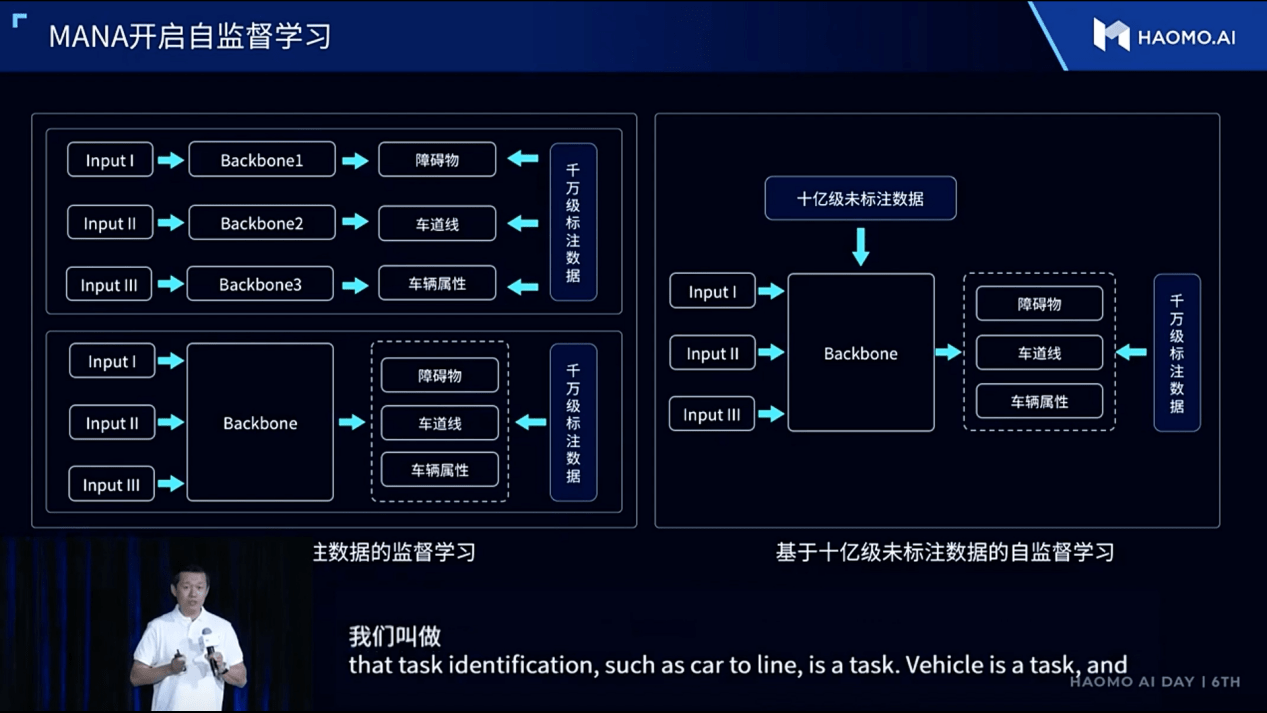
所以長久來看,如果想真正釋放海量數據帶來的迭代優勢,就必須降低“收費站”與“檢查站”的監督與限制,讓高速公路通暢起來;而數據也不能因為“收費站”與“檢查站”的放水而白白流失,AI需要學會從海量數據中直接抓取,進行訓練與學習。
這便是此次HAOMO AI DAY上重點提出的其中兩條技術思路,即建立無數據標注的自監督學習能力,徹底發揮海量數據的數量優勢,讓自動駕駛真正實現“指數級升級”;另外,為了防止有價值的新數據被存量數據稀釋,毫末智行也提出建立增量式學習訓練平臺,保證對新數據的運用,及整體數據集的有效混合。
提升對海量數據的應用能力與效率,核心是要讓自動駕駛能夠認識并構建出更真實的感知世界,并在此基礎上,讓認知能力持續提升,盡快達到“老司機”的標準。
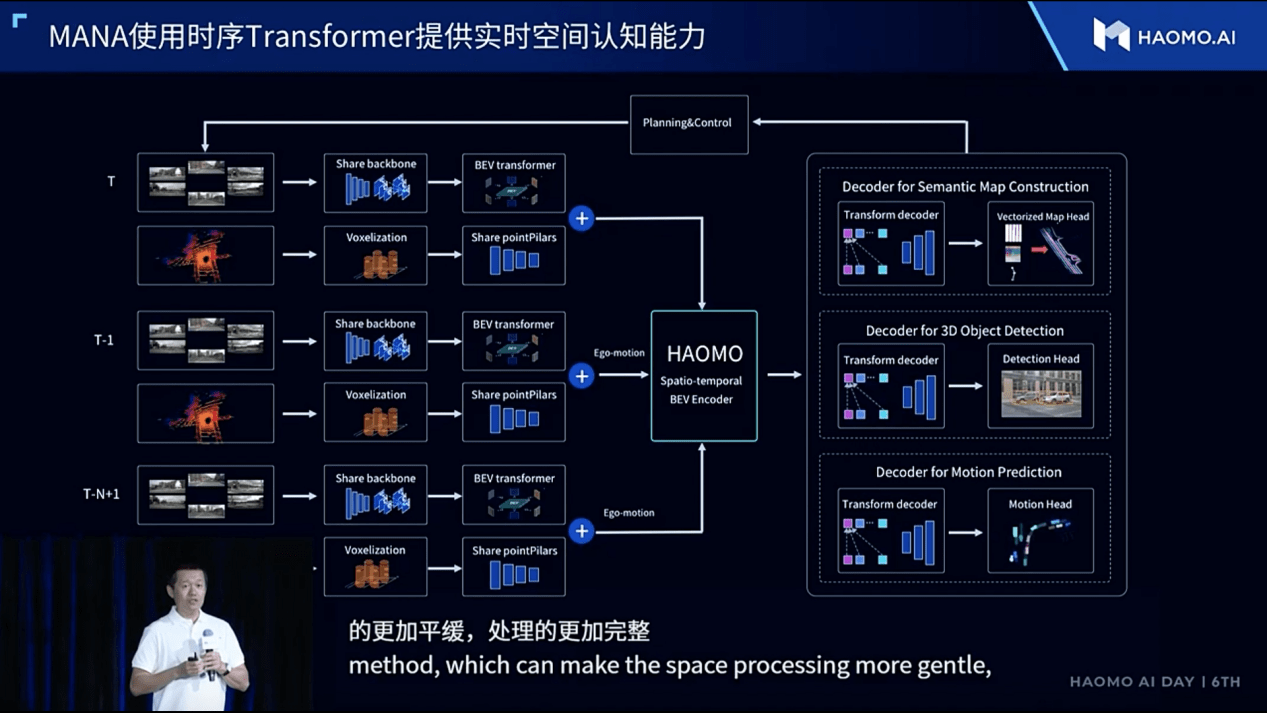
對此,毫末智行又提出了四條新觀點,首先便是借助Transformer在時序以及Attiontion方面的優勢,構建具有時序特征下、能夠對諸如車道線、障礙物等物體有更準確識別與判斷能力的實時虛擬場景。
在過去多模態感知融合過程中,由于算法模型本身的融合能力有限,經常會出來類似于多攝像頭的某特征信息沒有拼接好、視覺與雷達感知沒能實現同步的情況。
經過之前的“感知智能升級”,數據智能體系MANA已經達成了對搭建更準確感知世界的優化,而這一次則是借Transformer再次優化了一次。
而繼之前對紅綠燈識別做出升級外,對城市場景內更多交互接口的識別也納入了此次的升級范圍里,例如車輛的剎車燈、倒車燈與轉向指示燈——作為為人類設計的交互接口,自動駕駛實際并不能對其進行感知交互,但既然要取代人類駕駛,那么“融入人類”就顯得格外重要。
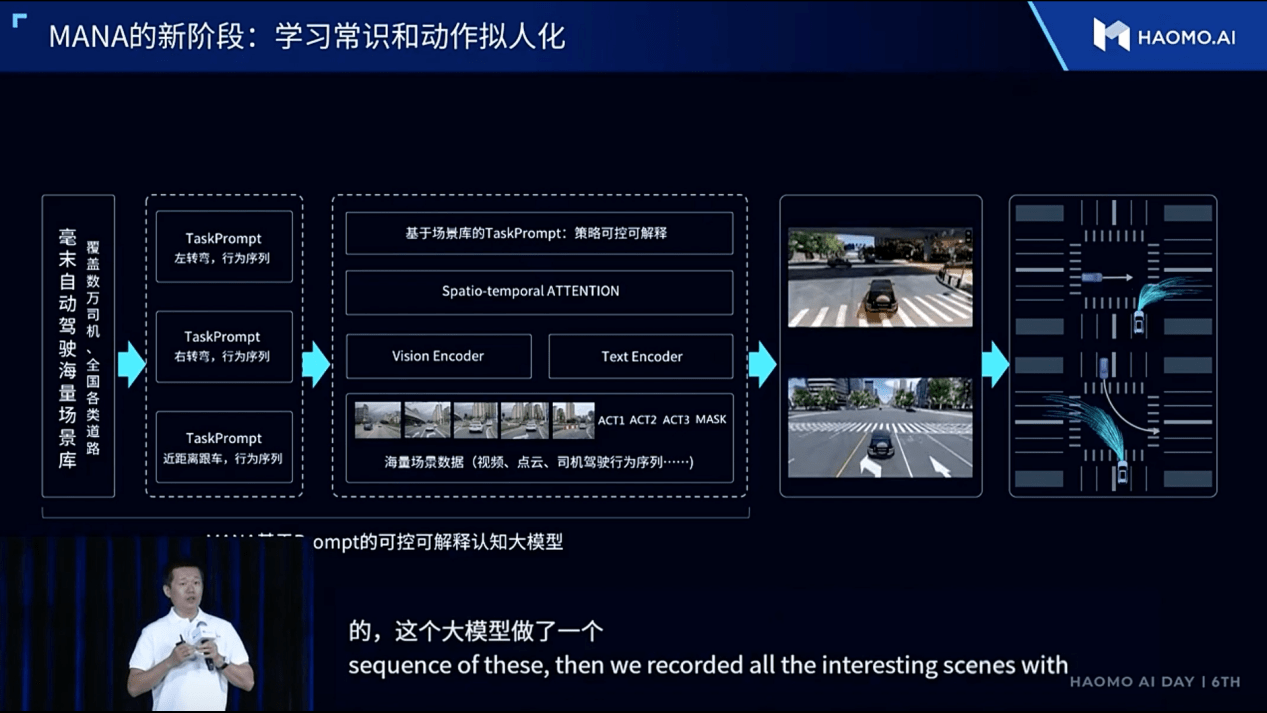
其次則是在“認知智能升級”的基礎上再升級。此前毫末智行的做法是,借助預訓練大模型,對有價值的數據進行篩選、標注并訓練,但訓練對象卻是各類以場景劃分的小模型。
而這次,毫末智行則將訓練對象升級為統一的大模型,即毫末智行的自動駕駛場景庫,所有原本零碎場景的小決策都將基于一個統一連貫的大決策,如此既能避免機械、生硬的輔助駕駛行駛表現,讓自動駕駛決策更像人的同時,也能讓這一決策變得更有可解釋性。
在借助海量數據提升對真實世界的感知后,還有針對仿真世界的提升,而在所有城市場景中,十字路口的變量最大、仿真難度最高。
對此,毫末智行則是選擇與阿里以及德清政府合作,利用路端設備將路口每時每刻的交通流都記錄下來,以此對仿真世界中的十字路口場景進行調校。由于真實場景獲取的數據數量及類型非常豐富,所以這對數據智能體系MANA的認知能力也會起到很大的幫助。
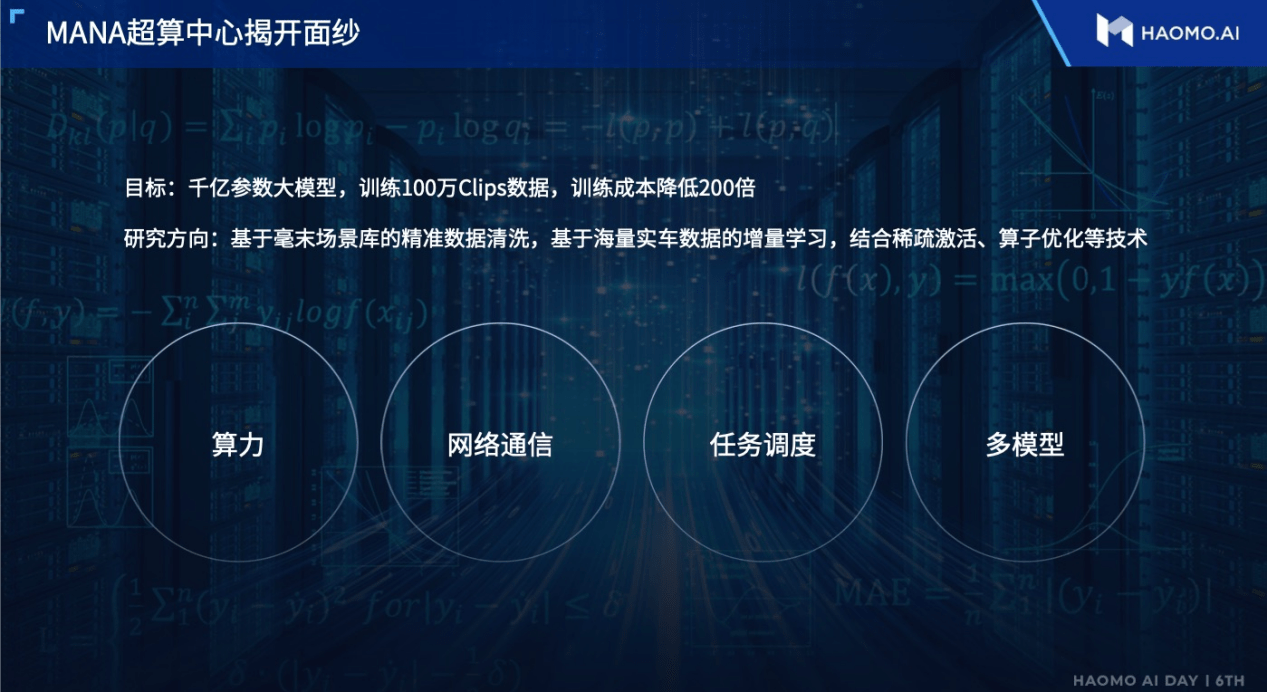
最后則是海量數據對龐大算力的需求。早在去年年底,毫末智行就宣布了建立超算中心的計劃,而此次HAOMO AI DAY上,毫末智行則更新了超算中心的新進度,后者不僅能滿足千億級參數,同時還能大幅降低訓練成本。這不得不讓人為其有朝一日的滿負荷運營充滿期待。
3.0時代后,才是自動駕駛正賽開始時
作為自動駕駛3.0時代的核心,數據驅動自動駕駛迭代、建立數據閉環將成為所有自動駕駛企業能否生存下來的關鍵,越早領悟到這一點,就越有可能從競爭中活下來,并看到3.0時代的曙光。
特斯拉是目前所有自動駕駛企業中最早步入自動駕駛3.0時代的,盡管其純視覺+眾包地圖的技術路線在一眾自動駕駛企業中顯得頗為極端,但憑借高效的數據獲取、學習及訓練能力,特斯拉得以將其軟、硬件實力發揮至極限,由此打通一條數據閉環,實現飛速發展。
毫末智行是第二家注意到數據重要性的自動駕駛企業,這使其能夠在一開始就確立數據驅動自動駕駛迭代的發展策略,并由此少走彎路,加速進入自動駕駛3.0時代。
不過話歸如此,屬于自動駕駛的3.0時代依舊只是剛剛開始,除特斯拉、毫末智行外,越來越多的自動駕駛企業也將因此而開始調轉船頭,真正精彩卓絕的高手對決,才正式鳴鑼開場。





