
在2025年中關村論壇的“未來人工智能先鋒論壇”上,智源研究院隆重發布了一項創新成果——跨本體具身大小腦協作框架RoboOS及其配套的開源具身大腦RoboBrain。這一組合旨在推動單機智能向群體智能的跨越,為具身智能的廣泛應用提供堅實的底層技術支持。

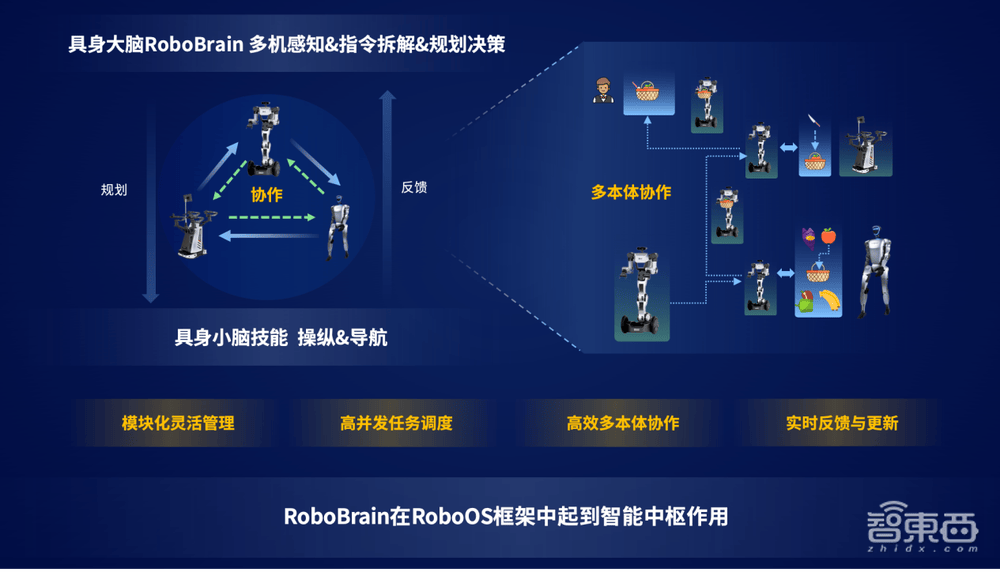
RoboOS框架和RoboBrain大腦的發布,標志著具身智能技術邁出了重要一步。它們不僅實現了跨場景多任務的快速部署,還促進了不同機器人本體之間的協作。RoboOS通過其獨特的“大腦-小腦”分層架構,將復雜場景感知與決策能力(由RoboBrain提供)與高效執行能力(由小腦技能庫承擔)緊密結合,確保了整個系統在長周期、高動態任務中的穩定運行。
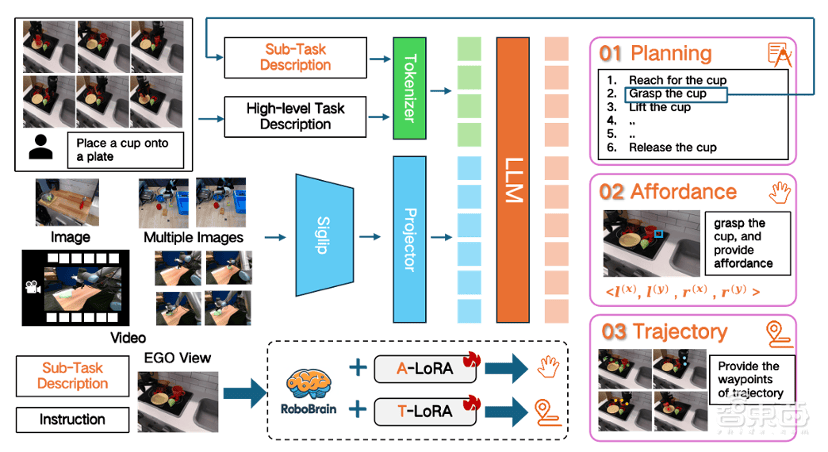
RoboBrain作為具身大腦的核心,融合了任務規劃、可操作區域感知和軌跡預測的三維能力。它能夠解讀人類指令和視覺圖像,生成基于實時反饋的行動計劃,預測每一步的軌跡,并感知相應的可操作區域。在任務規劃方面,RoboBrain在多個評測集上表現優異,超越了當時領先的閉源/開源模型。在可操作區域感知和軌跡預測方面,它也展現出了卓越的性能。
RoboOS框架則進一步增強了這種能力,通過模塊化設計、智能任務管理和跨本體協作,為機器人提供了高效、靈活、可擴展的底層支持。它支持多種類型的具身本體,如松靈雙臂、睿爾曼單/雙臂、智元人形、宇樹人形等,實現了大腦模型與小腦技能的“即插即用”。RoboOS還通過共享記憶系統實現了多個機器人之間的狀態同步與智能協作,突破了傳統“信息孤島”的限制。
在實際應用中,RoboOS和RoboBrain的組合展現出了強大的能力。在一個遞送蘋果和水果刀的任務場景中,睿爾曼單臂機器人、宇樹人形G1和松靈雙臂機器人分工協作,成功完成了任務。RoboOS接收指令后,遞送RoboBrain進行任務拆解,并將子任務分發給各個機器人本體。各機器人本體在執行子任務過程中,由RoboOS提供端云協作能力,實現了云端RoboBrain分發規劃、端側執行技能并實時反饋的閉環協作。
RoboOS還具備高度的擴展性與可遷移性。它原生支持異構機器人本體的靈活接入,以Profile模板機制快速完成機器人能力建模與適配。同時,它還提供了完備的模型適配與API接入能力,兼容自研的多模態VLM,作為可插拔的大腦決策引擎,在服務機器人、工業自動化、智慧物流、智能制造等領域支撐復雜任務的多機協作需求。

智源研究院此次發布的RoboOS和RoboBrain,不僅是有機融合和廣泛鏈接不同構型具身本體與豐富多元具身模型的重要一步,也是加速具身智能跨本體協作與規模化應用的關鍵舉措。未來,隨著更多產業合作伙伴的加入,具身智能生態將迎來更加繁榮的發展。





