
在AI技術日新月異的今天,一項新的突破正引領著行業向更深層次邁進。多模態AI領域的佼佼者考拉悠然攜手上海碼極客,共同推出了名為“悠然無界”的大模型,這一創新成果標志著空間智能技術邁入了全新的發展階段。
悠然無界大模型,作為一款專為空間智能設計的多模態世界模型,不僅具備空間感知與推理能力,還融合了具身執行與交互反饋的先進功能。它將具身智能的“大腦”與“小腦”能力整合于單一模型中,實現了感知、規劃、執行的閉環控制。這一突破性的設計,使得模型能夠同時理解和處理數字空間、物理空間以及社會空間的信息,展現出強大的跨模態泛化能力和通用性。

據考拉悠然首席執行官沈復民介紹,空間智能被視為AI發展的下一個重要方向。現有的大語言模型雖然在數字世界中取得了顯著成就,但在物理世界的應用價值仍有待挖掘。算力堆砌并不能直接轉化為生產力,要彌補這一鴻溝,關鍵在于打造能夠連接數字世界與物理世界的世界模型。悠然無界大模型正是在這一理念下應運而生,它基于2023年推出的悠然大模型進行升級,強化了感知、推理、決策和交互能力。
在訓練過程中,考拉悠然采用了多元異質數據聯合建模的方法,將真實數據、仿真數據與互聯網數據相結合,并融入跨領域知識,從而增強了模型的通用性。這一模型能夠理解自然語言形式的物理世界任務,感知具身智能本體的狀態,并驅動人形機器人、無人機、機器狗等終端智能體完成各種任務。同時,它還采用了考拉悠然提出的跨模態融合-自適應感知框架,解決了三維空間感知中的一系列難題,提升了智能系統對復雜空間環境的理解與建模能力。
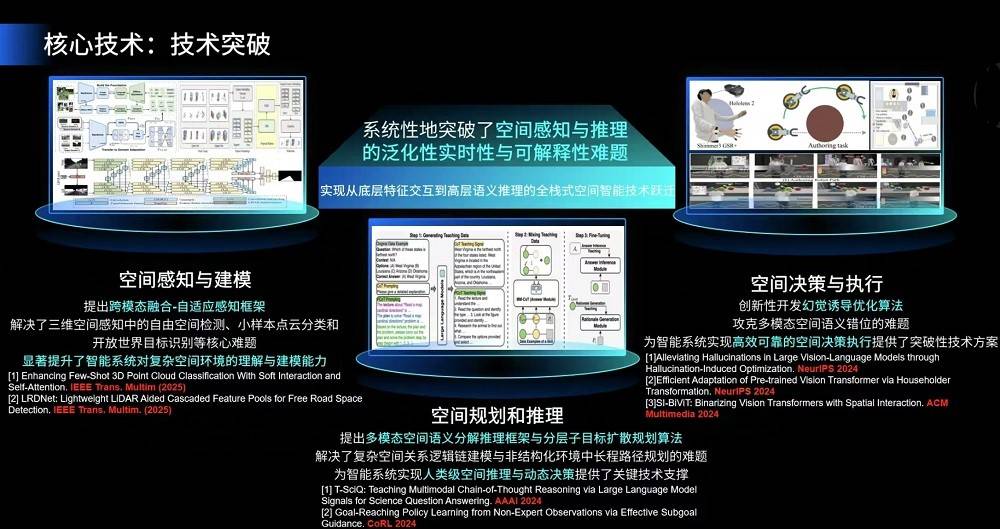
在空間規劃與推理層面,悠然無界大模型通過打造多模態空間語義分解推理框架與分層子目標擴散規劃算法,解決了復雜空間關系邏輯鏈建模與非結構化環境中長程路徑規劃的問題。這一突破使得智能系統能夠實現人類級的空間推理與動態決策。在決策與執行方面,模型采用的幻覺誘導優化算法則解決了多模態空間語義錯位的難題。
除了悠然無界大模型外,考拉悠然和上海碼極客還共同推出了空間智能Agent框架MAGXAgent,以及一系列基于該框架的智能體硬件本體產品。MAGXAgent基于悠然無界大模型的世界知識與空間理解能力,具備空間探知、自主決策、動態執行和交互反饋等能力。未來,這一框架將搭載于物流卸貨機器人、無人機、機器狗等任務本體上,執行應急救援、裝卸運貨、智能巡檢等物理世界任務。

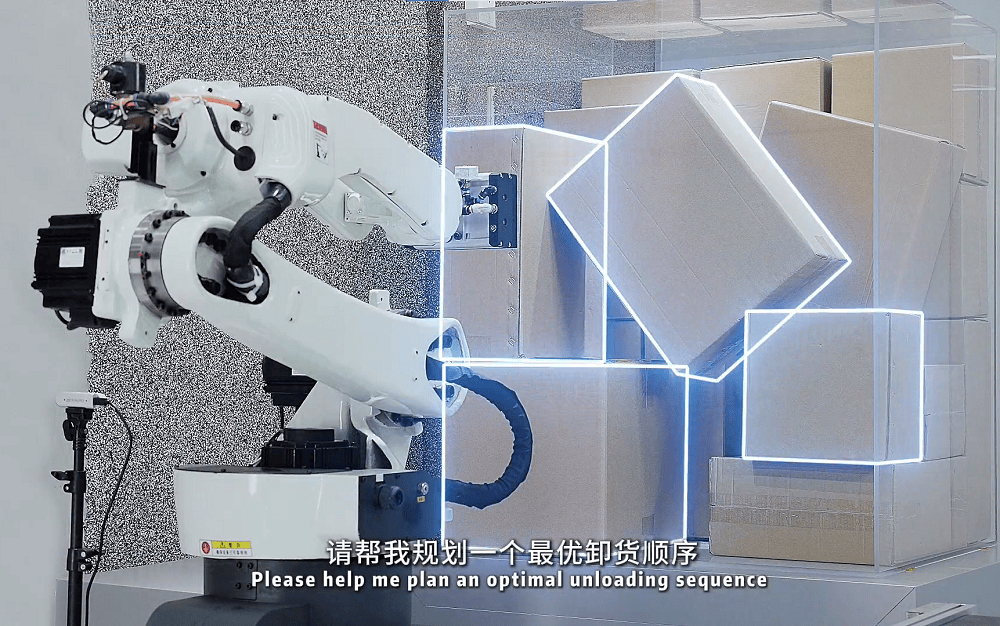
其中,MAGX Loader作為智能卸貨機器人的代表,展示了悠然無界大模型能力的實際應用場景。它能夠在復雜環境下完成精準目標識別、自適應位姿估計、實時障礙物評估、動態任務調度、卸貨路徑優化等一系列流程。用戶只需輸入一段語音指令,MAGX Loader即可全程自主實現貨品搬運,無需人工編程。
悠然無界大模型及MAGXAgent框架的推出,不僅標志著考拉悠然和上海碼極客在空間智能領域的領先地位,也為AI技術的未來發展提供了新的方向。隨著越來越多的企業開始布局世界模型領域,AI技術將逐漸實現對物理世界的深入理解和推理,為人類社會帶來更加智能、高效的解決方案。





