
2023年11月,面對客戶高效穩定的定位和建圖需求,思嵐科技以業界創新的產品形態提供了SLAMKit定位和建圖解決方案,以軟件授權的方式嵌入運行在機器人的主控器中,并為機器人提供環境建模與自主定位的能力。
SLAMKit 主要由三個部分組成,分別是:思嵐激光雷達、授權盒和授權軟件程序。致力于為用戶提供行業內首個導航系統軟件授權化服務,讓產品多快好省,讓方案多場景契合。

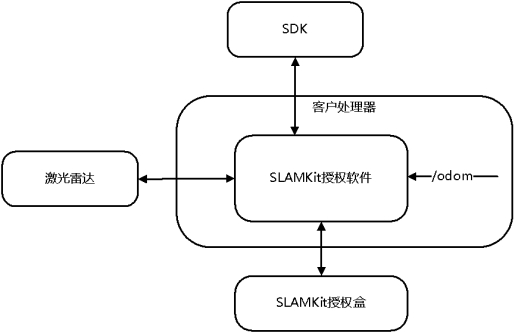
SLAMKit 的核心為授權軟件部分,其系統框圖如下所示,輸入為激光雷達數據、授權盒傳感數據、以及里程計數據,其中激光雷達數據和授權盒傳感數據為授權軟件獨立驅動獲取,里程計數據來自于客戶側的 ROS 節點。系統的輸出可被定義為上層可供二次開發的工具鏈,包括可視化交互工具 Robostudio、C++ sdk、JAVA sdk、Restful API sdk、ROS sdk 等。
SLAMKit定位與建圖解決方案核心優勢
1. 大場景高分辨率地圖構建
2. 思嵐自研SharpEdge™ 地圖優化技術
3. 高精度實時定位
4. 多變場景魯棒性定位
5. 可視化工具與SDK完整工具鏈支撐
6. 產品全生命周期的支持服務
大場景高分辨率地圖構建
1.5cm*1.5cm/pixel最高地圖分辨率
150m*150m(開發者版);500m*500m(專業版)
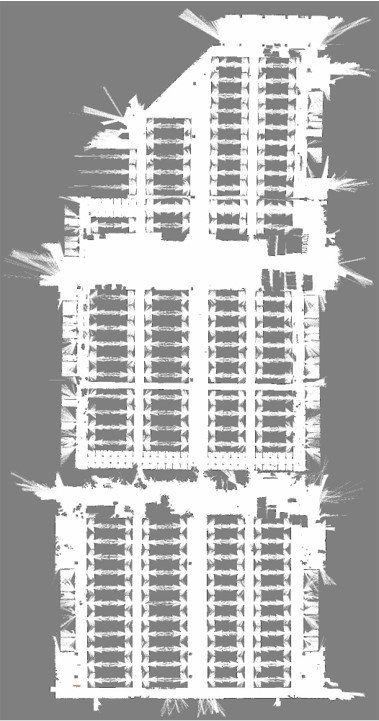
思嵐自研SharpEdge™ 地圖優化技術
SharpEdge™圖優化建圖模式,完美勾勒地圖細節。細節光滑,無需二次修飾,客戶可直接應用。

多變場景魯棒性定位
動態多變,相速度高及局部特征貧瘠場景下能夠實現穩定運行。
可視化工具與SDK完整工具鏈支撐
提供C++、Java SDK、ROS、Restful API 等SDK工具包,助力客戶快速進行二次開發。提供官網交互軟件RoboStudio,提供離線建圖、地圖編輯、地圖拼接等功能。
產品全生命周期的支持服務
可以通過軟件授權的方式為客戶提供開發、部署和運維服務,完成全生命周期的支持服務。
目前,SLAMKit已在全球渠道上線,可免費獲取【開發者版本】試用。值得一提的是,SLAMKit 所提供的授權盒可以作為軟件授權方案的授權鑰匙,也可以獨立作為一個 IMU 模塊使用。當授權盒作為獨立 IMU 模塊使用時,為客戶提供持續穩定的九軸傳感信號輸出,同時體驗一把高性能定位建圖方案試用。

ROS九軸IMU模塊
ROS兼容雙IMU
高精度定位
1. 高精度穩定數據輸出
2. 防零飄算法實現穩定yaw角輸出
3. 內置雙IMU與濾波處理算法
4. 原生USB數據輸出接口
ROS兼容與IMU數據可視化
SLAMKit授權盒作為IMU使用時,可讀取三軸加速度、三軸陀螺儀、三軸磁力計、三維歐拉角、四元數、去零飄航向角數據,幫助設備獲取更穩定、更準確的定位信息。同時200Hz高速多元數據輸出。

商用標準的結構與硬件設計
防塵金屬外觀,商用標準的結構與硬件設計,確保IMU模塊高效、穩定地服務于商業應用環境。
原生 USB 接口的高精度IMU模塊
內置了高精度的IMU模塊,配備原生USB接口,無需外接設備,方便將它與各種計算平臺相連,從而實時獲取和分析運動數據。
200Hz高速多元數據輸出
支持IMU200Hz高頻輸出定位和姿態數據,具有優秀的定位精度。





